Sols 4498-4499: Flexing Our Arm Once Again
3 min read
Sols 4498-4499: Flexing Our Arm Once Again
Written by Conor Hayes, Graduate Student at York University
Earth planning date: Monday, March 31, 2025
Planning today began with two pieces of great news. First, our 50-meter drive (about 164 feet) from the weekend plan completed successfully, bringing us oh-so-close to finally driving out of the small canyon that we’ve been traversing through and toward the “boxwork” structures to our southwest. Second, we passed our “Slip Risk Assessment Process” (SRAP), confirming that all six of Curiosity’s wheels are parked firmly on solid ground. Avid readers of this blog will be familiar with last week’s SRAP challenges, which prevented us from using the rover’s arm for the entire week. With a green light on SRAP, we were finally able to put our suite of contact science instruments back to work today.
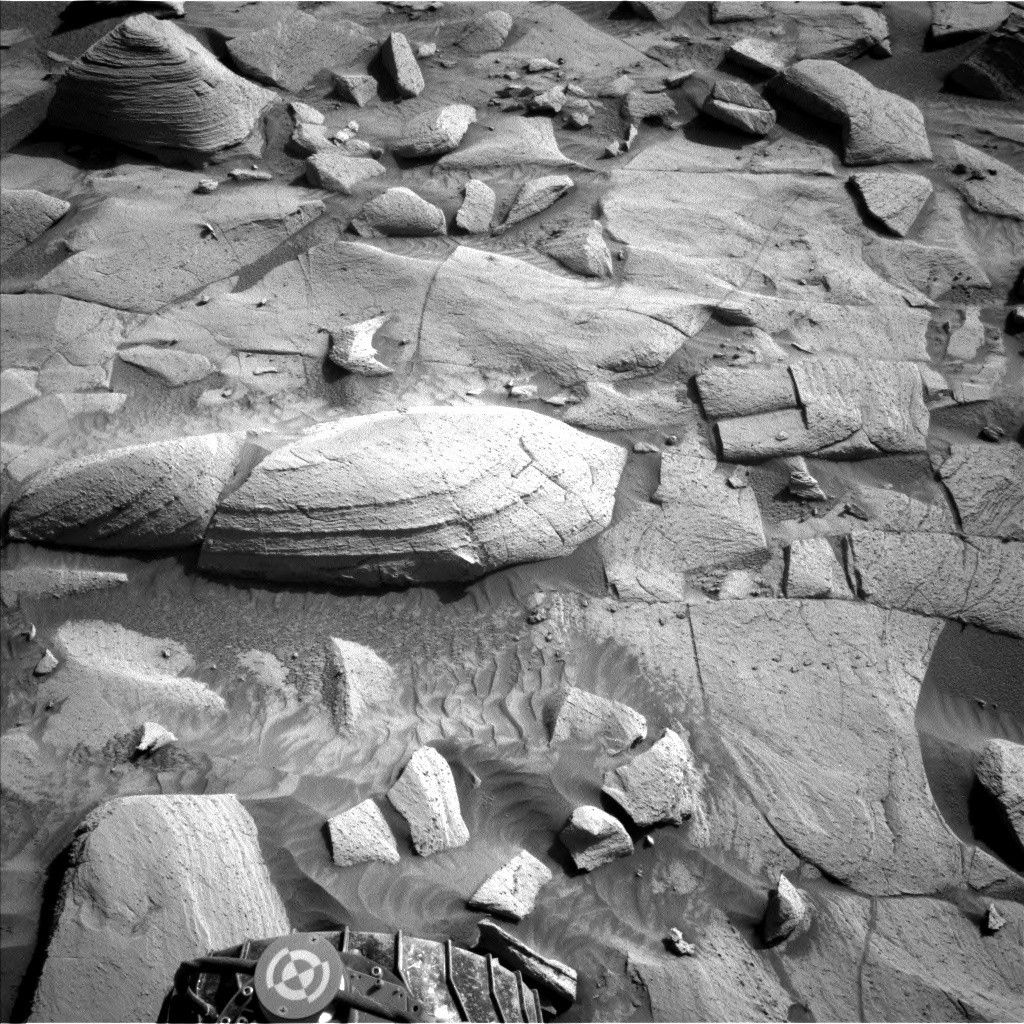
The arm gets to work early on the first sol of this plan, with an APXS integration on “Los Osos,” a bedrock target in our workspace, after it has been cleared of the ubiquitous Martian dust by DRT. The rest of our arm activities consist of a series of MAHLI observations later in the afternoon, both of Los Osos and “Black Star Canyon.”
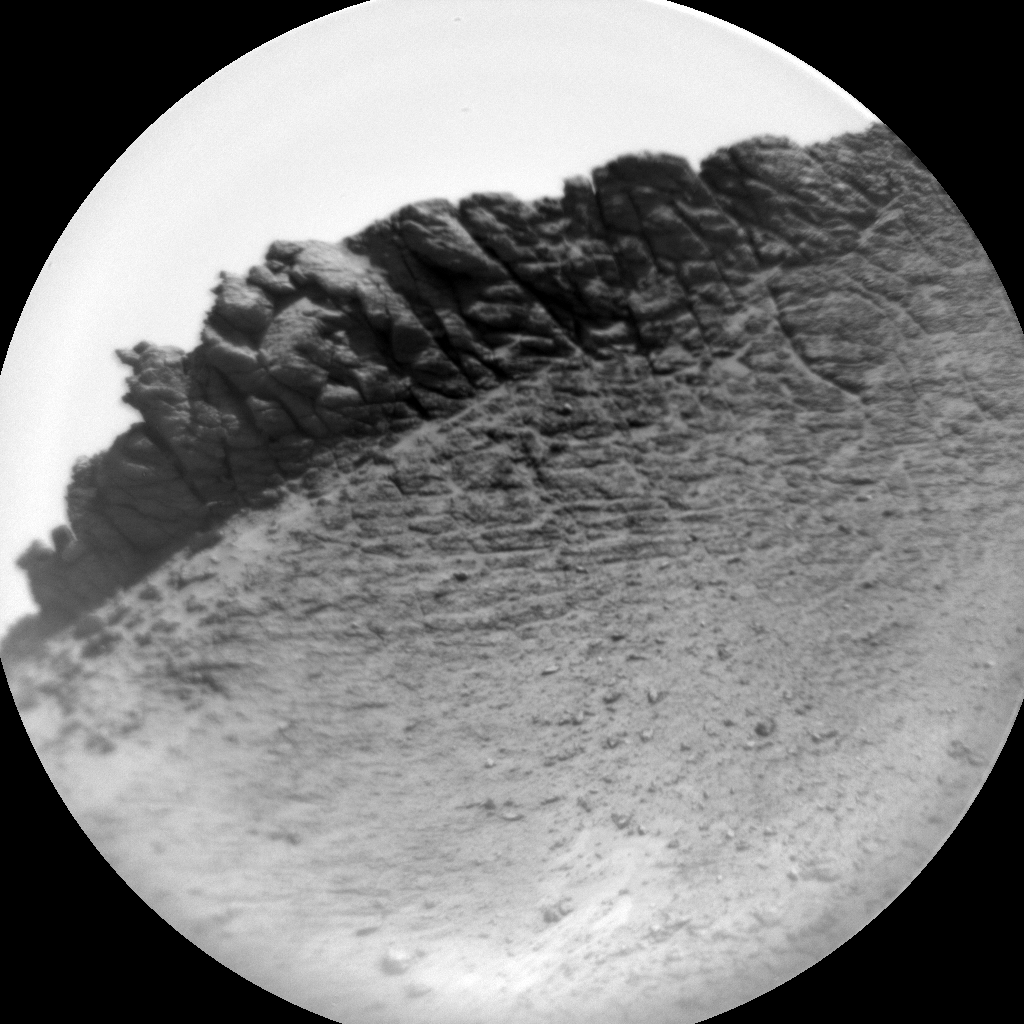
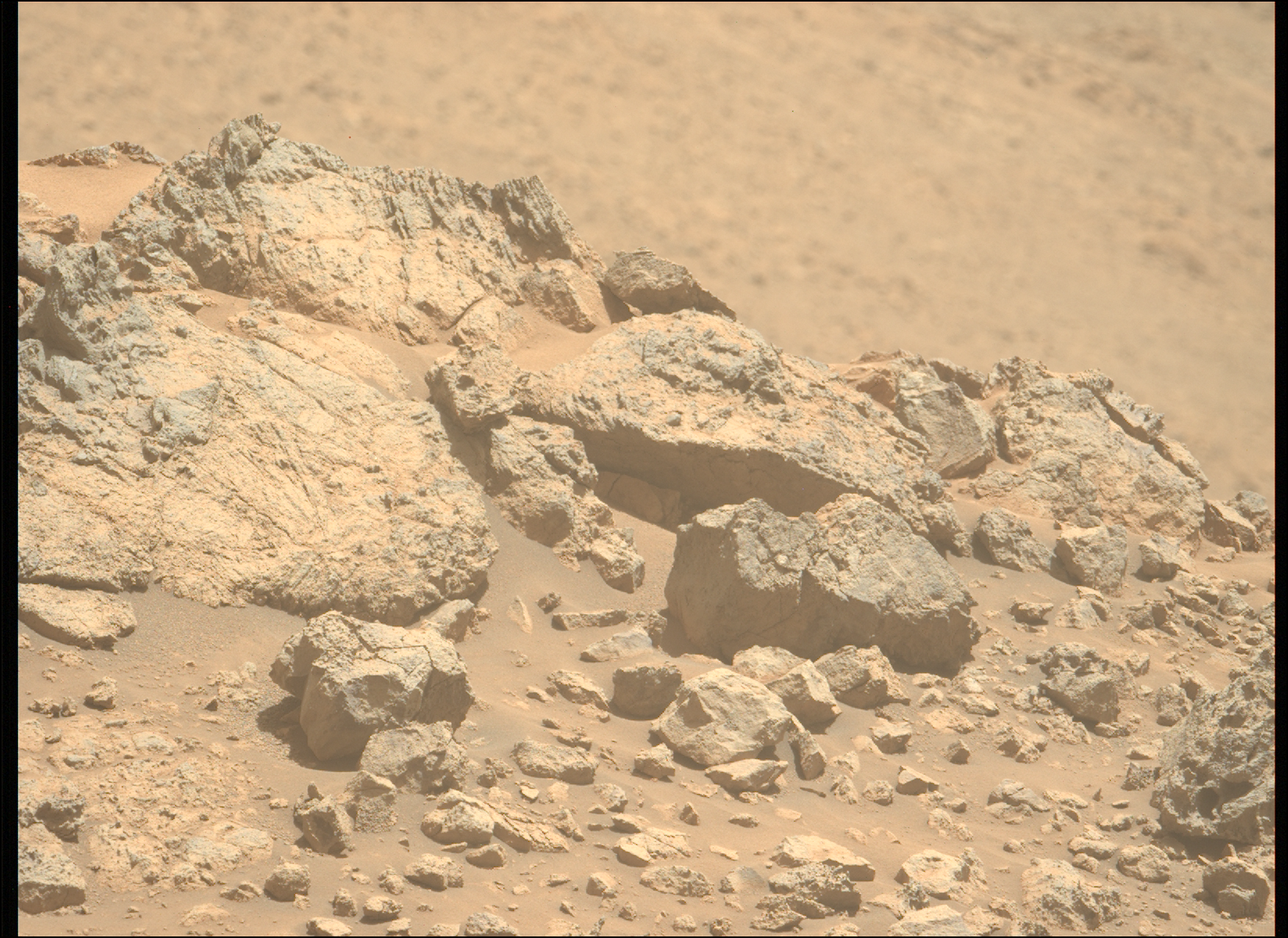
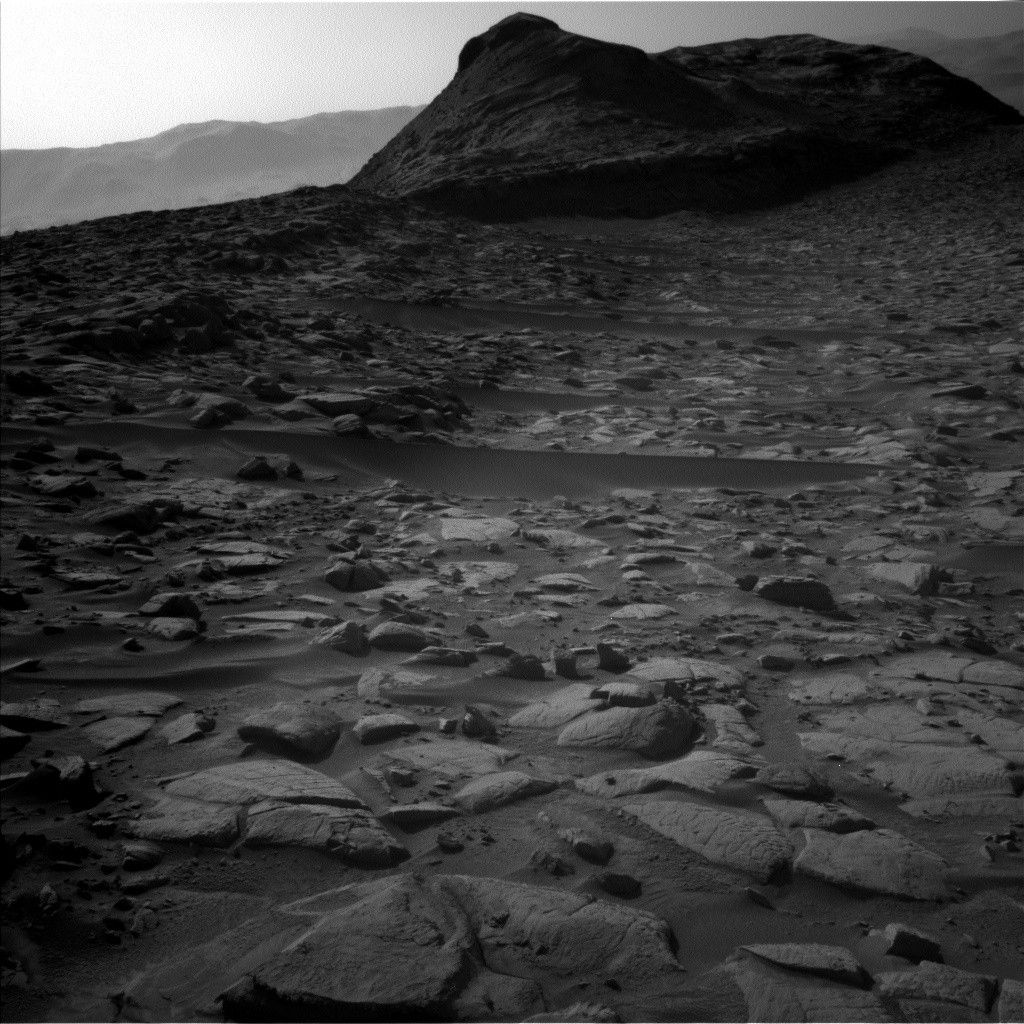
Of course, just because we managed to get contact science in this plan doesn’t mean we’re letting our remote sensing instruments take a break. In fact, we have more than two hours of remote sensing, split between the two sols and the two science teams (Geology and Mineralogy [GEO] and Atmosphere and Environment [ENV]). GEO will be using Mastcam to survey both the highs and the lows of the terrain, with mosaics of “Devil’s Gate” (some stratigraphy in a nearby ledge) and some small troughs close to the rover. We’ll also be getting even more Mastcam images of “Gould Mesa,” an imaging target in many previous plans, as we continue to drive past it. ChemCam gets involved with a LIBS observation of “Fishbowls,” which will also be imaged by Mastcam, a post-drive AEGIS, and two RMI mosaics of Gould Mesa and “Torote Bowl,” which was also imaged over the weekend.
ENV’s activities are fairly typical for this time of year as Curiosity monitors the development of the Aphelion Cloud Belt (ACB) with several Navcam cloud movies, as well as seasonal changes in the amount of dust in and above Gale with Navcam line-of-sight observations and Mastcam taus. We’ll also be taking a Navcam dust devil movie to see if we can catch any cold-weather wind-driven dust movement. ENV also filled this plan with their usual set of REMS, RAD, and DAN observations.
The drive planned today is significantly shorter than the one over the weekend, at just about 10 meters (about 33 feet). This is because we’re driving up a small ridge, which limits our ability to see what’s on the other side. Although our rover knows how to keep itself safe, we still prefer not to drive through terrain that we can’t see in advance, if it can be avoided. Once we’ve got a better eye on what lies in front of us, we will hopefully be able to continue our speedy trek toward the boxwork structures.